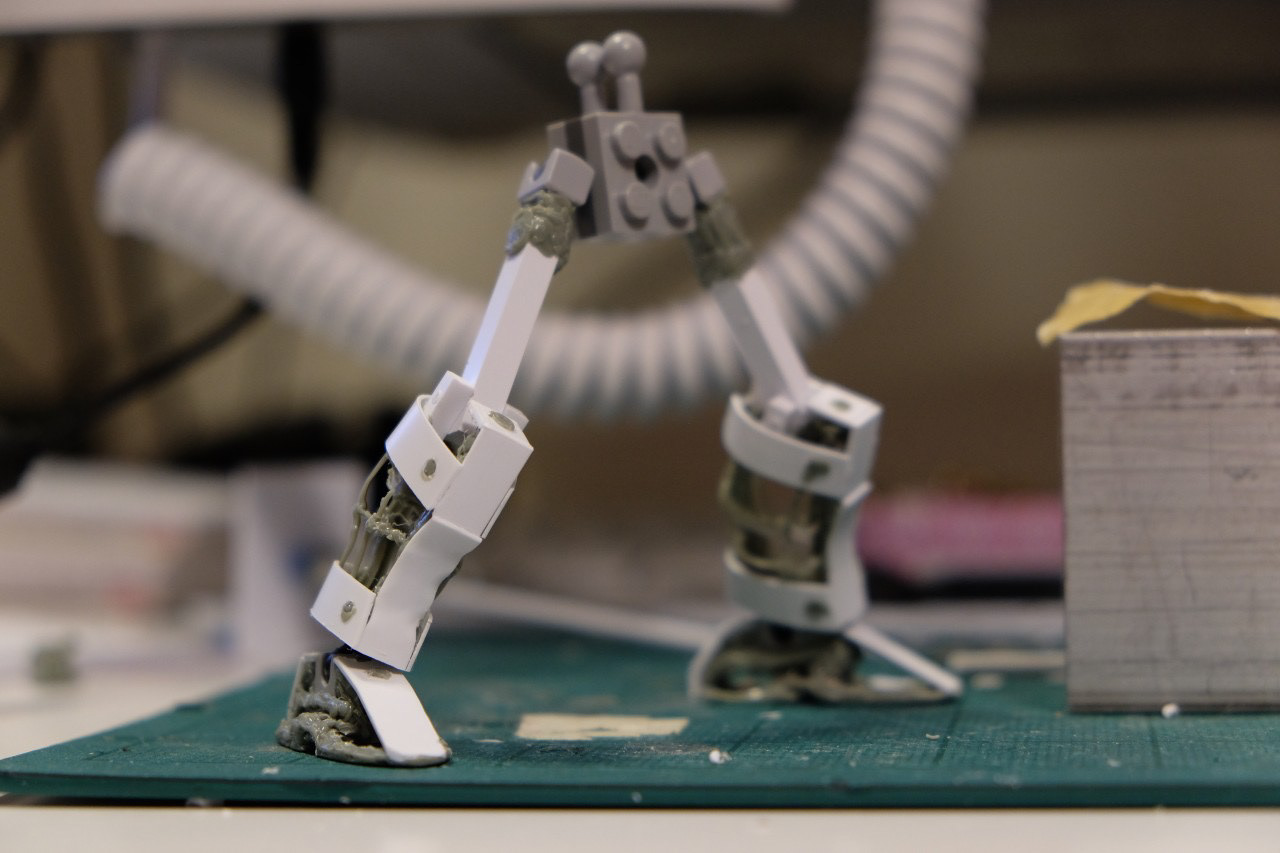
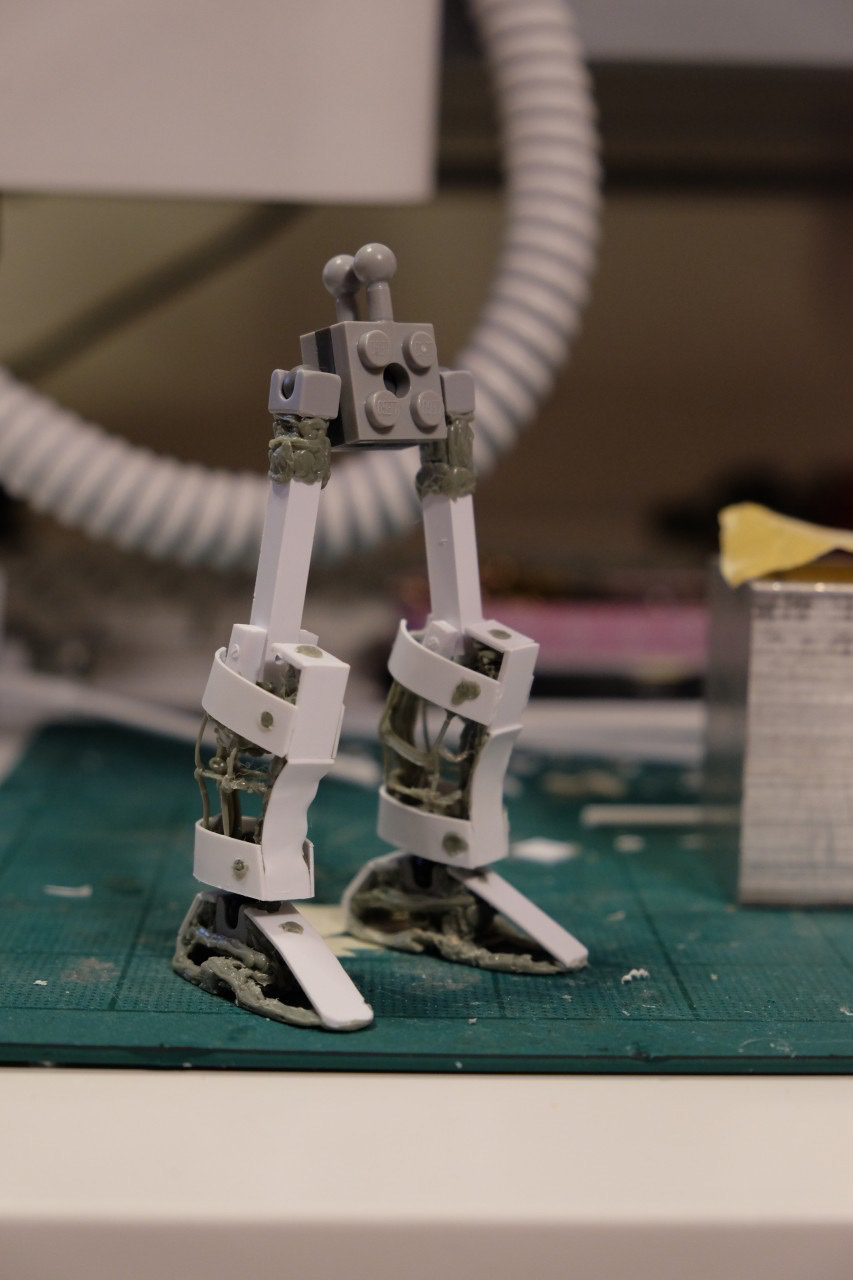
Designed and built small-scale articulated robot prototypes by translating rigged 3D models into physical mechanisms. Digital characters were developed with joint structures and range of motion in mind, then recreated physically to match their virtual counterparts.
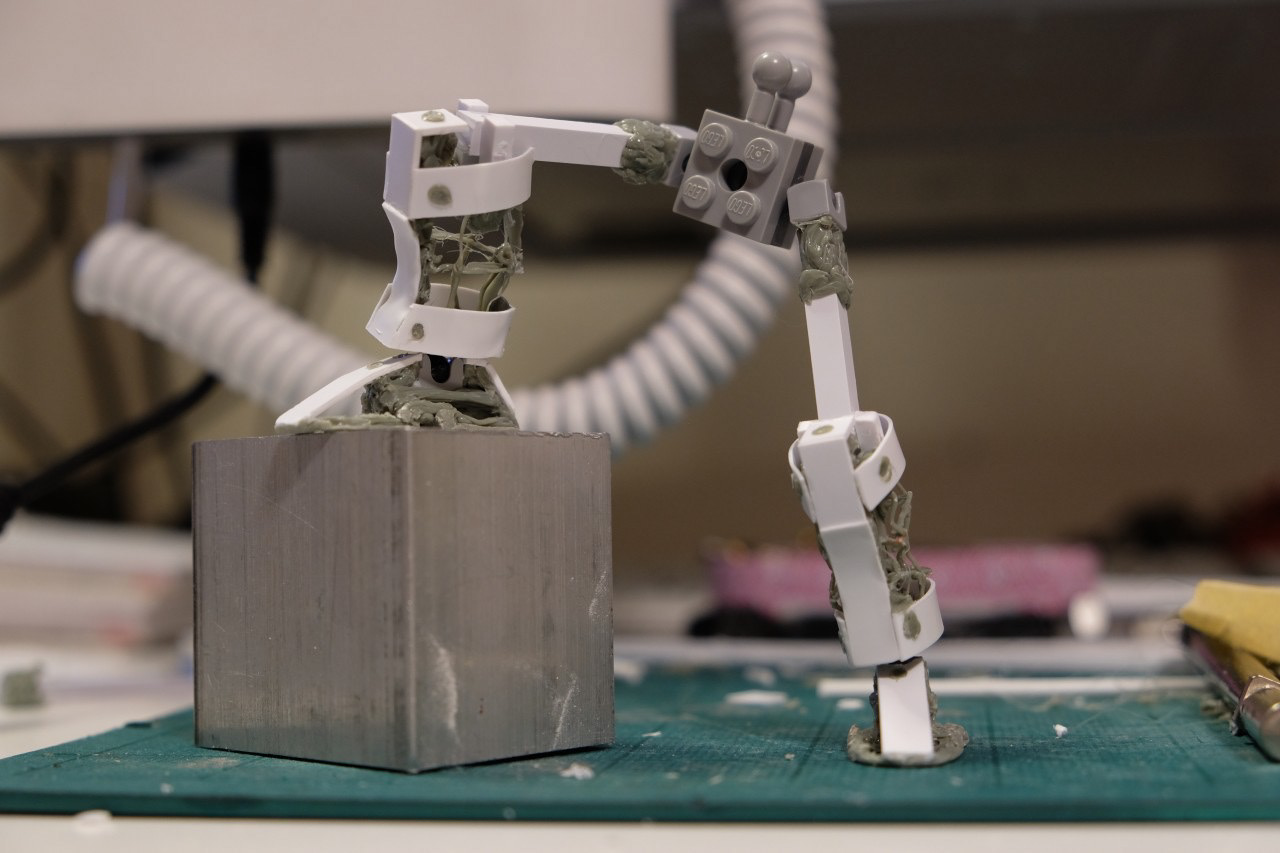
Established a working digital-to-physical workflow for testing how animated characters translate into real-world movement. Explored early-stage animatronic concepts through simple mechanical builds and servo-driven prototypes, focusing on joint behavior, motion consistency, and iterative problem-solving.
KEY SYSTEMS:
• Digital-to-physical rig translation (CG → physical)
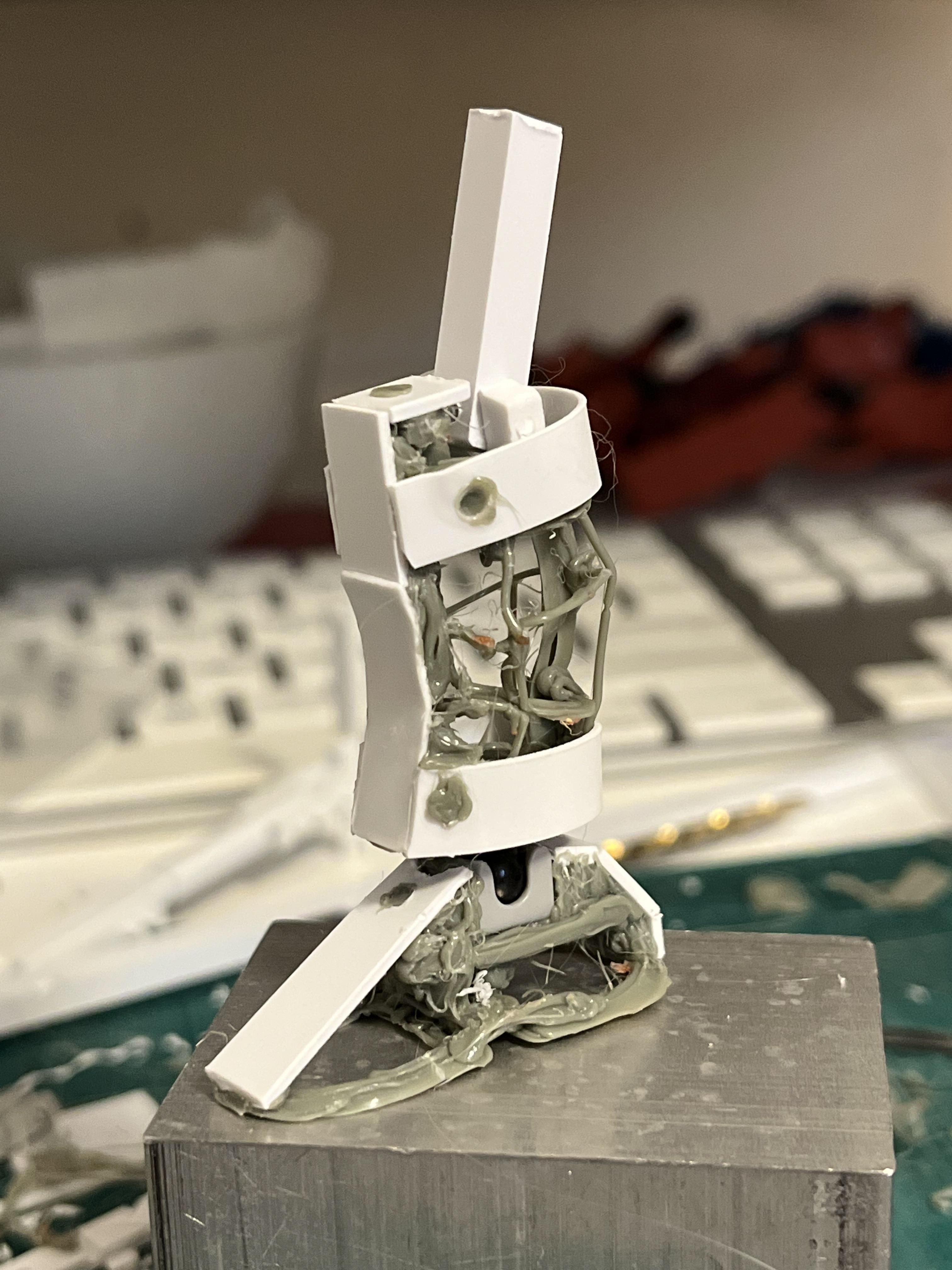
• Articulated joint design and motion testing
• XR-assisted prototyping (VR sculpt → build)•
• Mechanism-based problem solving
TOOLS: Blender | Shapelab VR | 3D Printing | Physical Fabrication | RC Servo Prototyping